
About
About
I’m a second-year PhD student at the CLAW Lab at Carnegie Mellon University (CMU), advised by Prof. Yonatan Bisk. I have also had the opportunity to closely work with Prof. Matthew Johnson-Roberson and Prof. Chris Atkeson.
I research robot manipulation and novel hardware to reduce the embodiment gap and sim-to-real gaps in dexterous manipulation. Previously, I worked on LLM spatial reasoning.
News and Olds
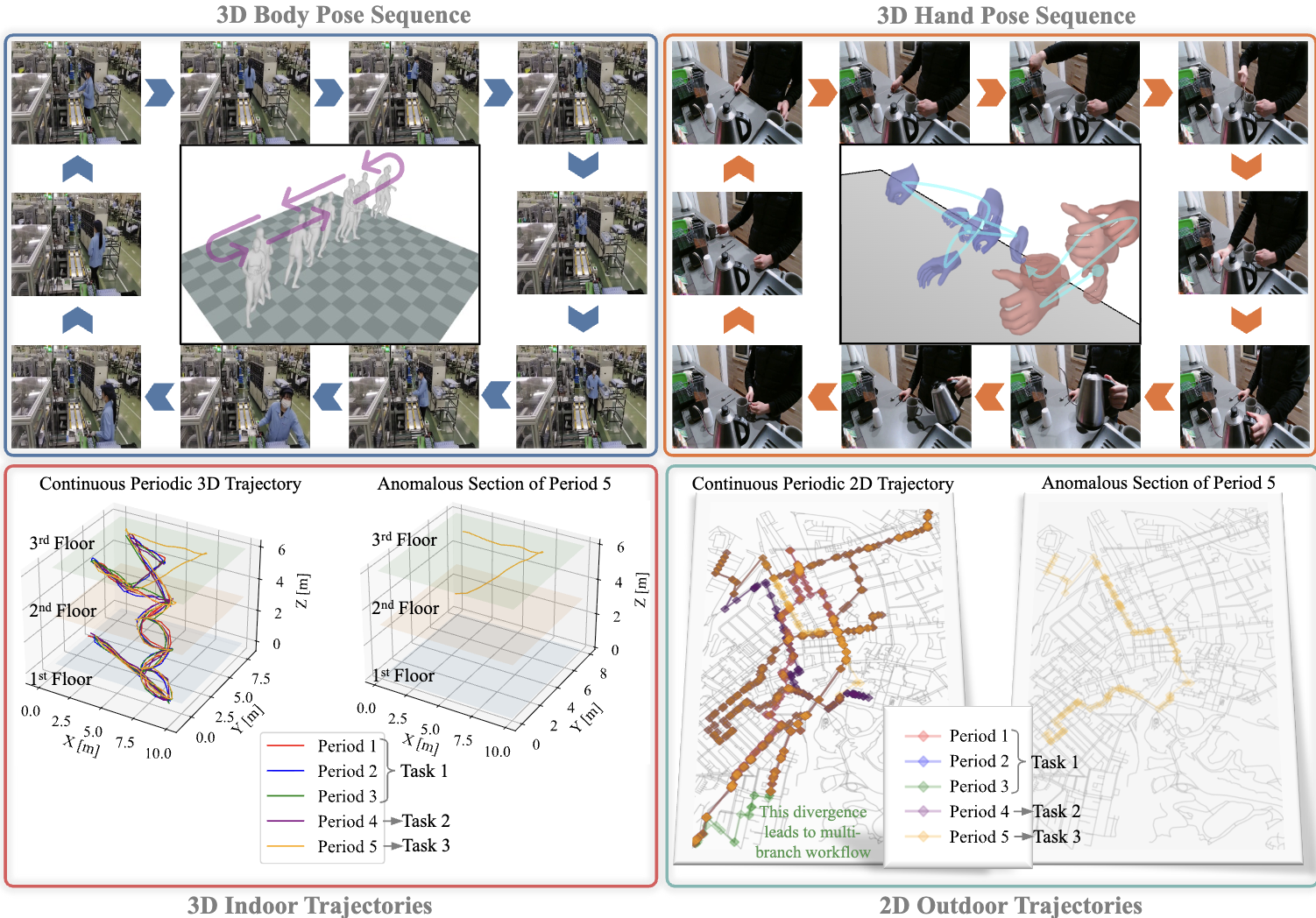
Oct 2025: New Paper accepted to WACV! See: Unsupervised Discovery of Long-Term Spatiotemporal Periodic Workflows in Human Activities
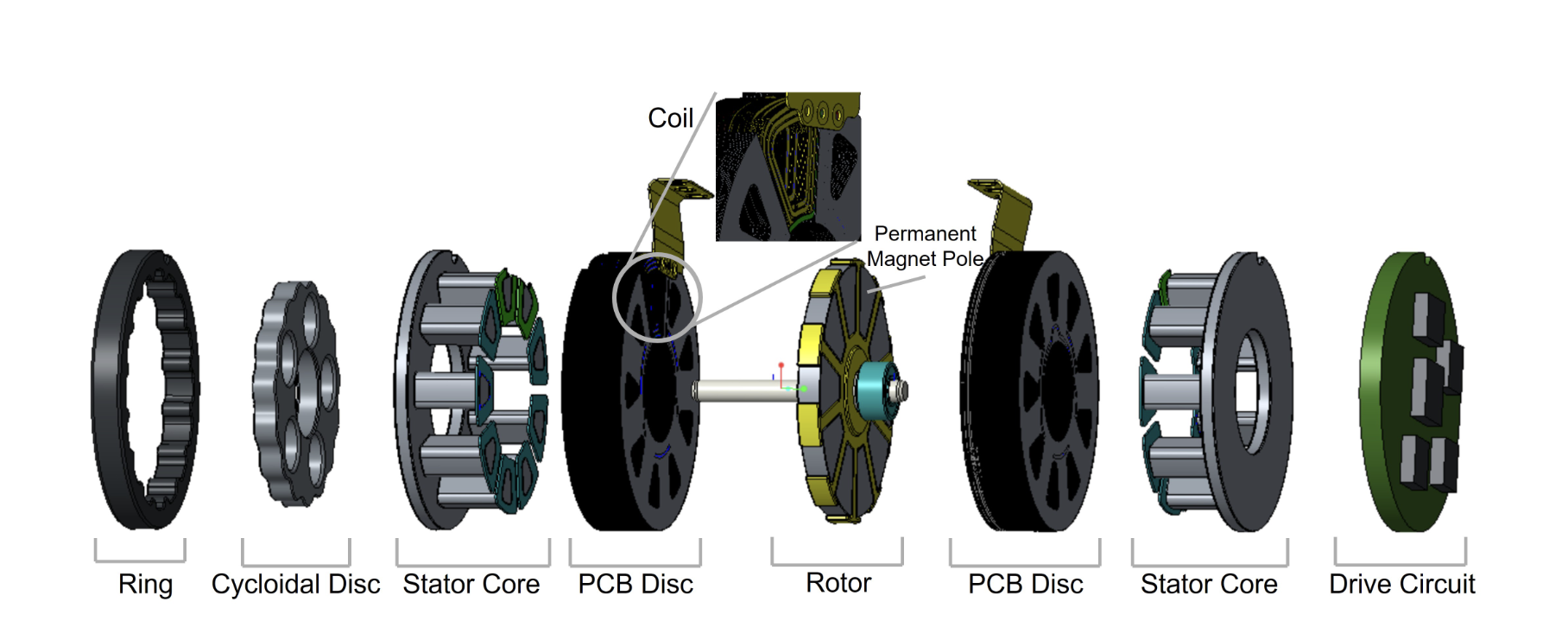
Sept 2025: New Paper Released on ArXiv on Axial Flux PCB Motor Design! See: High Torque Density PCB Axial Flux Permanent Magnet Motor for Micro Robots
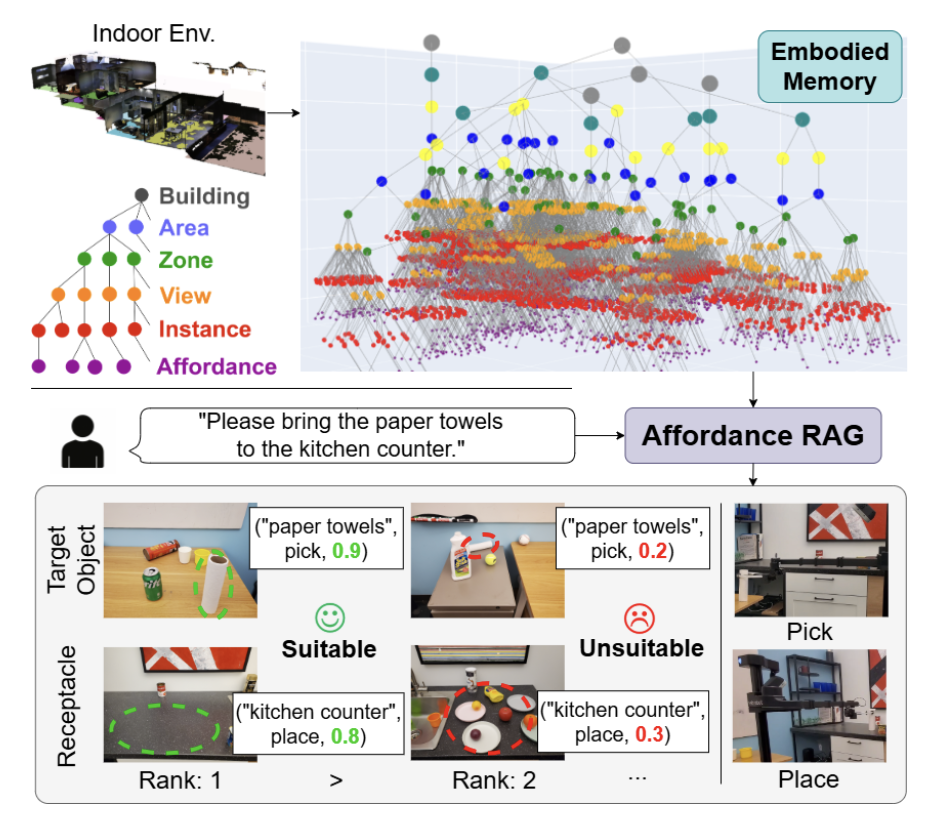
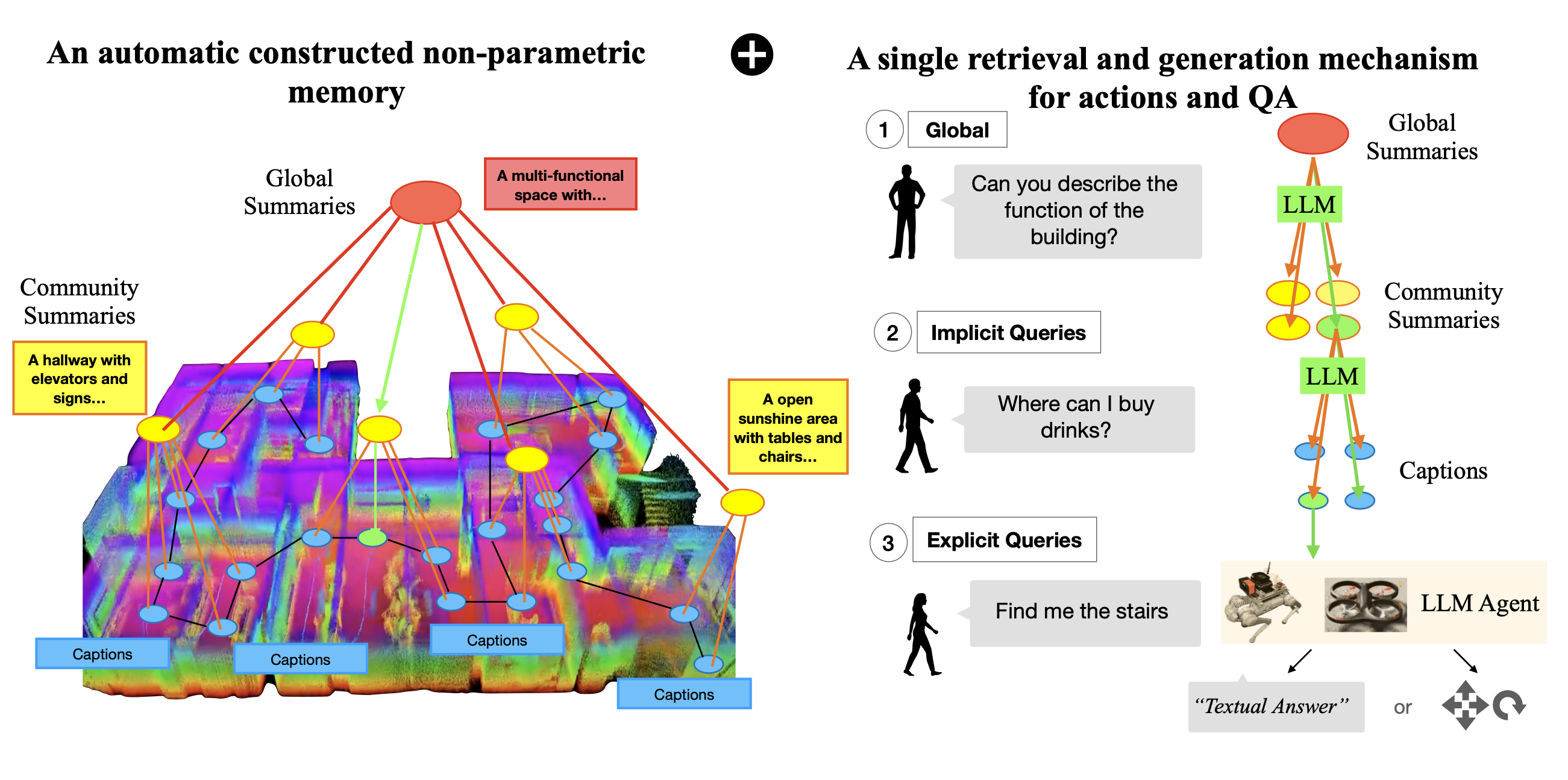
Dec 2025: New Paper accepted to RA-L! See: Affordance RAG: Hierarchical Multimodal Retrieval with Affordance-Aware Embodied Memory for Mobile Manipulation
Research
Experience
Professional Service
- Reviewer for CoRL, ICRA, RA-L, IROS
☕ Misc
I am a professional Ping Pong player and an avid fan of racket sports (Tennis, Badminton, and Pickleball).
I enjoy being outdoors—you can often find me on the golf course or hitting the slopes for skiing and snowboarding.
I train in Mixed Martial Arts, specifically practicing Muay Thai and Brazilian Jiu-Jitsu (BJJ) whenever I have the time.
I have a passion for precision engineering and enjoy assembling mechanical watches from scratch.